
实时远程操控机器人,即遥操作(teleoperation)技术的突破,正逐步改变人机交互的方式。近年来,工程师们致力于开发能够精确模仿人类全身动作的遥操作系统,使身体结构与人类相似的人形机器人得以完成复杂任务。

图片来源:arXiv
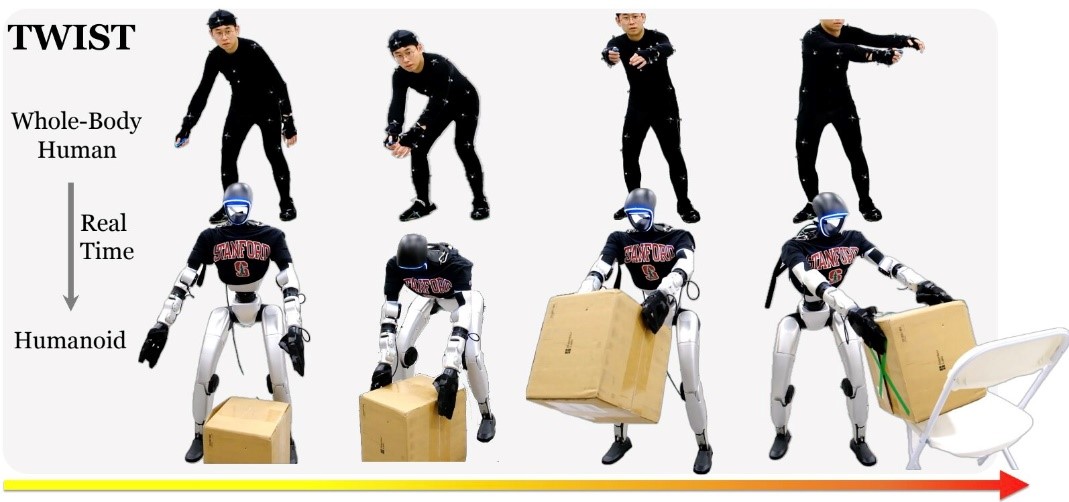
近日,斯坦福大学(Stanford University)与西蒙菲莎大学(Simon Fraser University)的研究团队推出了一项名为TWIST(全身仿生遥操作系统)的技术。该系统通过实时捕捉人类操作者的全身运动,并结合强化学习和模仿学习方法,驱动机器人以高精度完成各类现实世界中的任务。
TWIST的核心在于其对动作捕捉(MoCap)数据的高效利用。通过这一技术,机器人不仅能够精确复制人类的动作,还能在复杂的环境中表现出更高的适应性和灵活性。例如,在需要精细操作的任务中,TWIST可以显著提升机器人的表现,如医疗手术辅助、灾难救援或工业制造等场景。
研究团队在arXiv预印本服务器上发表的论文详细描述了TWIST的工作原理及其应用潜力。这项技术的突破性在于,它将人类的自然运动模式转化为机器人的控制指令,从而实现人与机器人之间的无缝协作。未来,随着TWIST技术的进一步优化,人形机器人有望在更多领域发挥重要作用,为社会带来深远影响。
文章来源于网络。发布者:武汉汽车网,转转请注明出处:https://www.tfuv.com/news/10574.html