
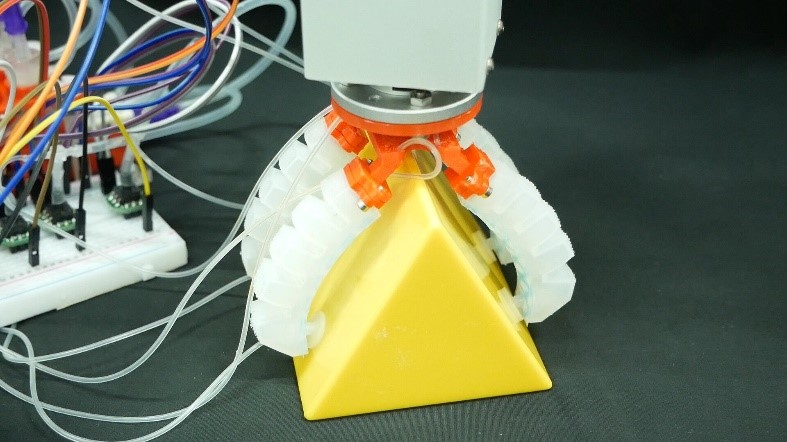
据外媒报道,受章鱼神经系统启发,布里斯托大学(University of Bristol)科学与工程学院的研究团队开发出一款能够自主感知环境并决定移动或抓取物体的软体机器人。这款设计简约却功能强大的机器人,通过利用空气或水流的流体动力,实现了吸力与运动之间的协调配合,其工作原理类似于章鱼通过数百个吸盘和多条触手完成复杂动作的方式。

这一突破性的研究灵感来源于自然界中章鱼的独特能力。章鱼不仅拥有复杂的神经系统,还具备高度灵活的身体结构,能够在各种环境中自由行动并完成精细操作。研究团队通过模仿章鱼的生物特性,将流体力学与人工智能技术相结合,使机器人能够根据外部环境的变化实时调整行为模式。
该机器人的核心优势在于其简单而高效的运行机制。它无需依赖复杂的传感器阵列或高性能计算单元,而是通过模拟章鱼吸盘的工作方式,直接利用环境中的流体动力实现自我驱动。这种设计理念不仅降低了制造成本,还显著提升了机器人的适应性和可靠性,使其在水下探测、医疗辅助以及工业自动化等领域具有广阔的应用前景。
此外,这款软体机器人还展示了仿生技术在未来科技发展中的重要价值。通过深入研究自然界中的生物机制,科学家们能够开发出更加智能且环保的技术解决方案。这一成果不仅是对传统机器人技术的一次革新,也为跨学科研究提供了新的思路和方向。
未来展望:从实验室到实际应用
随着技术的进一步完善,这类软体机器人有望被广泛应用于极端环境下的探索任务,例如深海科考、灾害救援等场景。同时,其灵活性和安全性也使其成为医疗领域的重要工具,例如用于微创手术或患者康复训练。布里斯托大学的研究团队表示,他们将继续优化机器人的性能,并探索更多实际应用场景,以推动这一技术从实验室走向现实生活。
文章来源于网络。发布者:武汉汽车网,转转请注明出处:https://www.tfuv.com/news/10577.html